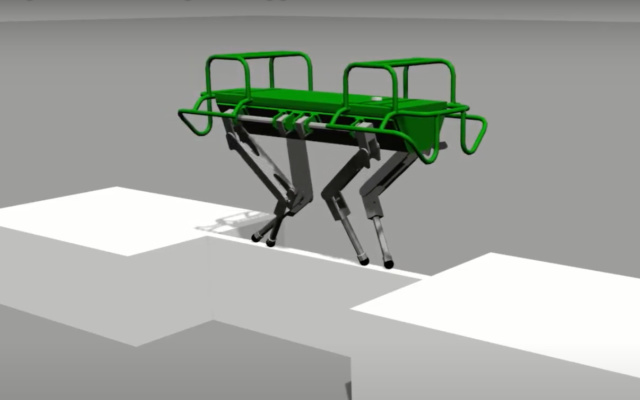
این ربات چهارپا میتواند تنها با استفاده از دو پا تعادلش را حفظ کند و بهصورت پاشنهپنجه قدم بزند. کنترلر مذکور در شبیهسازیهای دیجیتالی به رباتی ۹۰ کیلویی امکان داد از پلی به پهنای تنها ۶ سانتیمتر عبور کند. پژوهشگران مؤسسهی فناوری ایتالیا (IIT) در ویدئویی نشان میدهند که چگونه ربات مجهز به این کنترلر، حتی وقتی هُل داده میشود، تعادلش را روی دو پا حفظ میکند. این ربات حتی میتواند با قراردادن پاهایش روی دو سطح دارای ارتفاع متفاوت، تعادلش را روی دو پا حفظ کند. این تیم از IIT یافتههایشان را درمقاله ای بهتفصیل شرح دادهاند؛ مقالهای که در وبسایت arXiv منتشر شده است.
بی شک در ایالات متحده، «اسپات»، ربات شرکت بوستون داینامیک، محبوبترین ربات چهارپا است؛ ولی احتمالا با تولید کنترلرهای رباتیک جدید مثل کنترلر IIT، شاهد کاربردهای بیشتری از رباتهای چهارپا خواهیم بود.